引言
之前做工业机器人公司搞视觉接触了很多3D相机,这里记录一下这些相机点云的生成,以及各种类型相机的一些基础实现原理。我用过的有单目结构光相机,双目结构光,TOF相机,线扫相机(自研),多视角相机(自研)。
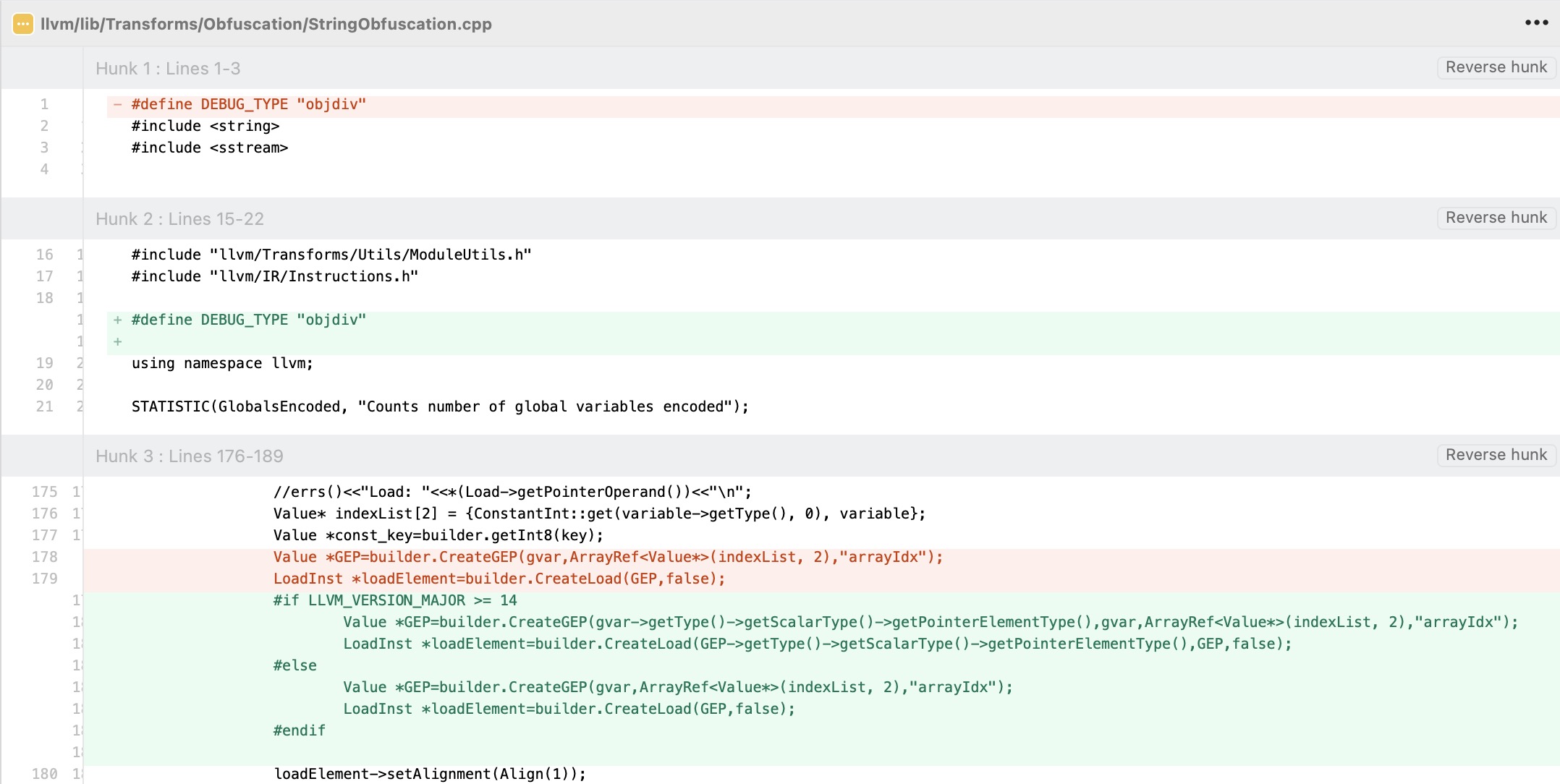
首先深度相机一般畸变都比较小,当然如果自己不放心可以标定看看结果。如果深度相机是自己买模组然后调教生成点云那就一定逃不了校准标定了。
相机成像原理
graph TB A[世界坐标系] --> |刚体变换| B[相机坐标系] B --> |透视投影| C[理想图像坐标系] C --> |畸变矫正| D[真实图像坐标] D --> |数字化图像| E[数字化图像坐标系]
相机的图像有时候会出现
修正图像需要相机两种参数:
- 相机的内部参数。例如镜头的焦距,光学中心和径向畸变系数。
- 外部参数:这是指摄像机相对于某些世界坐标系的方向(旋转和平移)
 。
。